짚 마스터 Master

- 짚 체인을 채용한 외팔보식 전동 리프터
- ・고속 운전
최대 1000mm/s(60m/min)의 고속 승강이 가능합니다. - ・고주파 운전
다점 정지에서도 고주파 운전이 가능합니다. - ・긴 수명
승강 100만 왕복의 긴 수명을 실현해, 메인터넌스도 용이합니다. - ・고양정
표준 2m 이상의 장스트로크도 대응할 수 있습니다.
짚 체인 이란?
- 고속·고주파 운전
- 다점 정지 기능
- 단트츠의 공간 절약
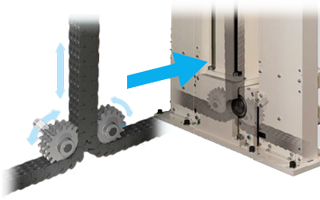
짚 체인 이란, 2개의 체인이 지퍼와 같이 맞물려, 1개의 견고한 기둥 형상이 되어 「밀기・끌어당김」을 할 수 있는 당사 독자 개발의 체인입니다.
쯔바키 짚 체인 액추에이터는, 이 체인을 사용한 직선 작동기로서 제품화한 것입니다.
기존의 공압·유압 실린더에 비해 공간 절약, 고속·고주파 운전, 다점 정지 기능, 고정지 정밀도, 설치 방향 자유 등 환경 배려점을 포함한 많은 특징을 가지고, 소형 액추에이터에서 대형 리프터까지 폭넓게 사용되고 있습니다.



동영상 콘텐츠
짚 마스터 ZME 시리즈
특징
다른 구동 방식을 압도하는 고속·고주파 운전
연속 운전이 가능한 짚 체인의 채용으로, 다른 방식을 능가하는 고속·고주파 운전을 가능하게 합니다.
- ・고속:최대 1000mm/s
- ・고빈도:300왕복/시도 가능
- ・긴 수명:승강 100만 왕복 이상
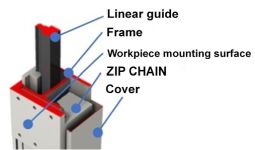
장스트로크 에서도 강성이 뛰어난 자립형
컴팩트하고 강성이 높은 지주를 채용. 리니어 가이드를 내장하고 있기 때문에, 장스트로크 에서도 오버행 로드를 견디는 구조입니다.
- ・고양정:2000mm 이상도 대응 가능
- ・고강성:리프트마스터와 같은 리니어 가이드를 채용
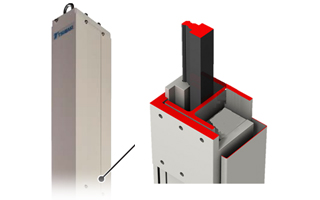
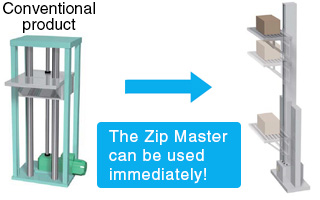
「일체 설치형」의 간단 설치로 조립 공수 삭감
짚 체인, 리니어 가이드, 모터를 일체화한 「일체 설치형」
설계, 조립 공수가 걸리는 종래의 승강기와 달리, 짚 마스터 두는 것만으로 사용할 수 있습니다.
* 수직 반송기로도 사용할 수 있습니다.
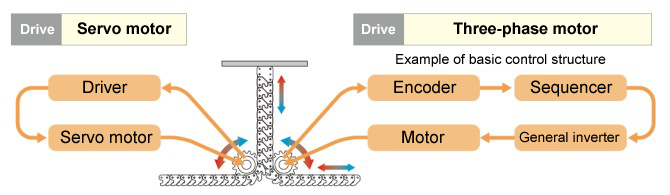
다점 정지, 다단 위치 결정 실현
짚 마스터는 제어 구성이 간단하기 때문에 다점 정지 · 다단 위치 결정을 쉽게 실현할 수 있습니다.
구조와 다른 방식의 비교
■ 독자적인 내부 구조
드롭 리프터와의 비교
종래의 수직 반송 리프터는 현장에서의 장치 조립이 필요한데, 구동부의 설치나 점검을 위해 천장측에 발판을 마련해야 합니다.
짚 마스터는 일체형 구조이므로, 장치 조립·설치가 편하다. 또한 구동부가 바닥면측에 배치되어 있기 때문에 점검이나 유지보수 작업은 안전하고 용이합니다.

짚 체인 기구와 나사 기구의 비교는 이쪽을 참조해 주세요
사양
- ・승강하중:1.96kN~9.80kN
- ・스트로크:1,500mm/2,000mm
- ・속도:330~1,000mm/s(19.8~60m/min)
- ・구동부:삼상 모터 부착/서보 모터 부착
카탈로그 · 취급설명서
형번 표시
| ZME | L | 0500 | H | 20 | G | E |
| | | 짚 마스터 |
| | 선형 가이드 방식 |
| 승강 하중 0200:1.96kN{200kgf} 0500:4.90kN{500kgf} 1000:9.80kN{1000kgf} |
| 속도 M, H, U 속도는 아래 제품 형번 일람을 참조하십시오. |
| 스트로크 15:1500mm 20:2000mm |
| 구동부 G:삼상 모터 부착 K: 서보 모터 부착 |
| 옵션 자세한 내용은 아래 참조 |
■ 쯔바키형번내비
사용하는 나사의 종류입니다.
승강 하중
규정의 중심 위치에서 승강 가능한 하중입니다.
속도
승강 속도를 나타내는 기호입니다.
각 기종의 속도값은 상세 정보를 참조하십시오.
스트로크
승강할 수 있는 거리입니다.
구동부
G: 삼상 모터 부착입니다.
K: 서보 모터 부착입니다.
옵션 기호
L1: 위치 검출 센서를 1개 추가합니다.
V: 전원의 전압이 배전압이 됩니다.
E: 모터 후면에 로터리 엔코더를 장착합니다.
제품 형번
※ 형번 클릭으로 상세 정보를 표시합니다.
| 승강 하중 kN{kgf} |
스트로크 mm |
구동부 | 속도 M (19.8m/min) |
속도 H (48m/min) |
속도 U (60m/min) |
|---|---|---|---|---|---|
| 1.96 {200} | 1500 | G(삼상 모터 부착) | --- | --- | ZMEL0200U15G |
| 2000 | --- | --- | ZMEL0200U20G | ||
| 4.90 {500} | 1500 | --- | ZMEL0500H15G | --- | |
| 2000 | --- | ZMEL0500H20G | --- | ||
| 9.80 {1000} | 1500 | ZMEL1000M15G | --- | --- | |
| 2000 | ZMEL1000M20G | --- | --- | ||
| 1.96 {200} | 1500 | K(서보 모터 부착) | --- | --- | ZMEL0200U15K |
| 2000 | --- | --- | ZMEL0200U20K | ||
| 4.90 {500} | 1500 | --- | ZMEL0500H15K | --- | |
| 2000 | --- | ZMEL0500H20K | --- | ||
| 9.80 {1000} | 1500 | ZMEL1000M15K | --- | --- | |
| 2000 | ZMEL1000M20K | --- | --- |
옵션
위치 검출 센서 추가 [옵션 기호: L1]
・표준품에 4개의 위치 검출 센서를 갖추고 있습니다만, 1개의 센서를 추가할 수 있습니다.
・보다 많은 센서 추가를 희망하시는 경우는, 상담해 주십시오.
대응 사이즈:전표준 형번 품
모터 전압 400V급[옵션 기호:V]
・구동용 모터의 전압을 400V급으로 변경합니다.
대응 사이즈:ZMEL0200U□□G, ZMEL0200U□□K, ZMEL0500H□□K, ZMEL1000M□□K
※ZMEL0500H□□G, ZMEL1000M□□G를 선정한 후, 모터 전압 400V급을 희망하시는 경우는 상담해 주십시오.
로터리 엔코더 부착 [옵션 기호: E]
・3상 모터 부착 모터 반부하측 축단에 로터리 엔코더를 내장하여 모터의 회전 신호를 출력할 수 있게 됩니다.
대응 사이즈:ZMEL0200U□□G
※ZMEL0500H□□G, ZMEL1000M□□G를 선정한 후, 로터리 엔코더 부착을 희망하시는 경우는 상담해 주십시오.
특징
・제어성
감속기로부터 오픈 콜렉터 출력 신호를 취출할 수 있으므로, 다양한 운전이 가능하게 됩니다.
・컴팩트
모터 축과 로터리 엔코더를 커플링으로 연결할 필요가 없습니다.
· 비용 절감
기존의 별도 배치와 비교해 커플링 베이스 플레이트나 레벨 맞추기 작업이 불필요합니다.
로터리 엔코더부 사양
| 전원 전압 | DC4.5~30V |
|---|---|
| 펄스 수 | 100 |
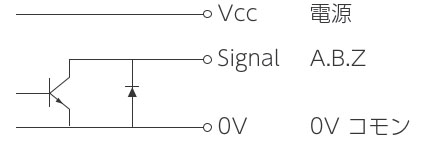
| 출력 형태 | 오픈 콜렉터 출력(NPN형) 6개 AB90° 위상차 신호 +Z 원점 신호 |
| 출력 회로 |
|
| 소비 전류 | 30mA 이하 |
| 출력 전압 | 0.5V 이하(최대인입시) |
| 최대 흡입전류 | 40mA MAX |
| 신호 상승 하강 시간 |
1μs 이하 |
| 최대 응답 주파수 | 240kHz |
| 출력 회로 내압 | 50V MAX |
| 케이블 길이 | 0.5m 커넥터 부착 (히로세 전기 (주) 제조 DF3-6S-2C) |
| 진동 | 4.9m/s 2 {0.5G} 이하 (20~50Hz) |
구조·치수(로터리 엔코더 설치부)
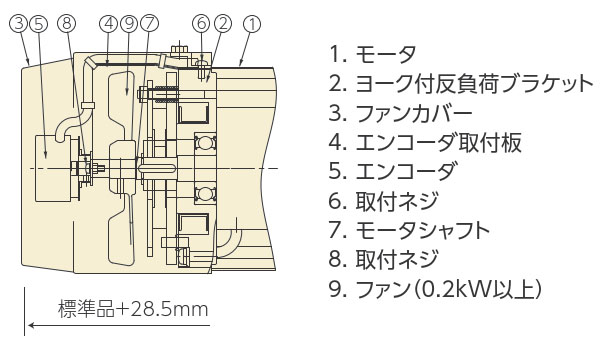
[클릭으로 확대]
결선표
| 핀 No. | 칼라 | 연결 |
|---|---|---|
| 1 | 레드 | 전원 |
| 2 | 블랙 | 0V 공통 |
| 3 | 블루 | 신호 A |
| 4 | 화이트 | 신호 B |
| 5 | 노랑 | 신호 Z |
| 6 | 블랙 | 실드 |
선정
사용조건・희망조건에 해당하는 리프터를 담당자가 선정합니다.
이 페이지 상단의 "선정계산 "탭을 클릭하십시오.
짚 마스터 검토시의 주의점
- ・ 짚 마스터는 승강 속도가 빠르기 때문에, 인버터 제어를 필수로 해, 충분한 가감속 시간을 마련해 사용해 주십시오.
급가속・급정지하면 정지정도의 악화나 워크의 진동이 발생하는 경우가 있습니다.
설치면・암의 강성이나 하중 조건에 의해 기동 정지시에 짚 마스터가 흔들리는 경우는 가감속 시간을 길게 취해 사용해 주십시오.
또, 흔들림량을 경감시키는 경우는 짚 마스터 상부의 고정을 검토해 주십시오.
- ・ 짚 마스터의 칭호 속도는 최대 속도입니다.
승강 시간을 구하는 경우는 가감속 시간을 포함하여 계산해 주십시오.
- ・추가 승강 시간의 단축・고빈도 운전・다점 위치 결정・연동 운전 등이 필요한 경우는 서보 모터 구동을 권장합니다.
요망의 서보 모터 메이커에 대응하므로 상담해 주십시오.
- ・하강시에는 큰 회생 전류가 발생하므로, 사용 조건에 따라 충분한 인버터 회생 저항기의 용량을 마련해 주십시오.
회생 저항기의 용량에 대해서는 인버터 메이커에 상담 바랍니다.
- ・인버터는 모터에 대하여 1프레임 큰 용량의 사용을 권장합니다.
- ・인버터 트립시에는 브레이크가 작동하는 시퀀스를 짜 주십시오.
- ・ 짚 마스터는 무여자 작동형 브레이크 부착 모터를 채용하고 있습니다.
서보 모터 사양으로서 귀사에서 모터를 준비하는 경우는 브레이크 부착 키 홈축 사양을 채용해 주십시오.
또, 만일의 낙하에 대비 고객이 낙하 방지 기구를 준비해 주십시오.
또한 당사에서도 낙하 방지용 핀을 특형 대응으로 제작 가능합니다.
