기술자료 드라이브체인 선정에 대해
선정에 필요한 계산식
수식에 사용할 기호와 단위
| 기호 | 설명 | SI 단위 | {중력 단위} |
|---|---|---|---|
| αb | 부하 감속 | m/s2 | m/s2 |
| αs | 부하 가속도 | m/s2 | m/s2 |
| C | 축간 거리를 링크 수로 나타낸 것 | - | - |
| C′ | 기장 | m | m |
| d | 감속기 출력축 스프로킷 피치 원 직경 | mm | mm |
| d1 | 작은 스프로킷의 피치 원 직경 | mm | mm |
| d2 | 큰 스프로킷의 피치 원 직경 | mm | mm |
| D | 드럼 외경 | mm | mm |
| Fb | 감속시 체인장력 | kN | kgf |
| F'b | 감속시의 보정 체인 장력 | kN | kgf |
| FC | 대차 구동 체인 장력 | kN | kgf |
| F'C | 대차 구동 보정 체인 장력 | kN | kgf |
| Fℓ | 부하(실하중)측 토크에 의한 체인 장력 | kN | kgf |
| F'ℓ | 부하(실하중)측 토크에 의한 보정 체인 장력 | kN | kgf |
| Fm | 원동기 정격 출력(kW)에 의한 체인 장력 | kN | kgf |
| F'm | 원동기측으로부터의 보정 체인 장력 | kN | kgf |
| Fms | 원동기의 시동 토크에 의한 체인 장력 | kN | kgf |
| F'ms | 원동기의 시동 토크에 의한 보정 체인 장력 | kN | kgf |
| Fmb | 원동기의 브레이크 토크에 의한 체인 장력 | kN | kgf |
| F'mb | 원동기의 브레이크 토크에 의한 보정 체인 장력 | kN | kgf |
| FS | 가속시의 체인장력 | kN | kgf |
| F'S | 가속시 보정 체인 장력 | kN | kgf |
| FW | 부하(실하중)에 의한 체인 장력 | kN | kgf |
| F'W | 부하(실하중)로부터의 보정 체인 장력 | kN | kgf |
| f1 | 롤러와 레일의 마찰 계수 (윤활 있음 0.14 윤활 없음 0.21) | - | - |
| G | 표준 중력 가속도 G = 9.80665m/S 2 | - | - |
| i | 속비(예) 1/30이면 i=30으로 한다 | - | - |
| Iℓ{GD2ℓ} | 부하의 원동기축 환산 관성 모멘트 | kg・m2 | kgf・m2 |
| Im{GD2m} | 원동기 축의 관성 모멘트 | kg・m2 | kgf・m2 |
| K | 충격 계수 | - | - |
| Kn | 회전 계수 | - | - |
| Ks | 서비스 요소 | - | - |
| Ku | 불균형 하중 계수 | - | - |
| Kv | 핀 기어 속도 계수 | - | - |
| Kz | 잇수 계수 | - | - |
| L | 체인 길이 (링크 수) | - | - |
| m | 체인의 단위 질량 {중량} | kg/m | kgf/m |
| M{W} | 하중 질량 {중량} | kg | kgf |
| n | 체인 속도를 구할 때 작은 스프로킷의 회전 속도 | r/min | rpm |
| n1 | 원동기 축의 회전 속도 | r/min | rpm |
| n2 | 부하축의 회전속도(종동축의 회전속도) | r/min | rpm |
| P | 체인 피치 | mm | mm |
| R | 관성비 | - | - |
| S | RS 어태치먼트 부착 체인의 어태치먼트 높이(드럼 장착면에서 체인 피치 중심까지의 거리) | mm | mm |
| tb | 감속 시간 | s | s |
| tS | 가속 시간 | s | s |
| Tb | 원동기의 브레이크 토크 | %(kN・m) | %(kgf・m) |
| Tmax | 원동기의 최대 (정동) 토크 | %(kN・m) | %(kgf・m) |
| TS | 원동기의 시동 토크 | %(kN・m) | %(kgf・m) |
| Tℓ | 부하 토크 | kN・m | kgf・m |
| Tm | 작용 토크 | kN・m | kgf・m |
| Tn | 원동기 정격 토크 | kN・m | kgf・m |
| V | 체인 속도 | m/min | m/min |
| Vℓ | 부하 속도 | m/min | m/min |
| Z | 대형 스프로킷 의 잇수 | - | - |
| Z′ | 작은 스프로킷 의 잇수 | - | - |
| ω | 원동기 축의 각속도 | rad/min | rad/min |
| ωb | 원동기 축의 각 감속 | rad/s2 | rad/s2 |
| ωS | 원동기 축의 각가속도 | rad/s2 | rad/s2 |
계산식
- 1. 체인을 포함한 전송 효율 η = 1로서 모든 선정을 하고 있습니다.
- 2. 선정에 사용하는 장력이나 전동 kW는 표의 13항, 14항에서 계산한 값을 사용해 주십시오.
| 품목 | SI 단위 | {중력 단위} |
|---|---|---|
|
1. 체인 길이(링크 수): L |
2축 감기 전동일 때
|
|
|
핀 기어 구동 |
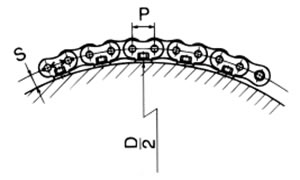
드럼 외주에 어태치먼트 부착 체인을 드럼 외권으로 사용하는 경우 L = 180° tan-1 P D + 2S
|
|
|
2. 체인 속도: V |
V = P × Z' × n 1000 (m/min) |
|
|
3. 원동기 정격출력(kW), 정격회전속도에 의한 체인장력:Fm |
Fm = 60 × kW V (kN) |
Fm = 6120 × kW V (kgf) |
|
4. 부하의 관성 모멘트 I(GD 2) |
Iℓ = M × V 2πn1 2 (kg・m2) |
GD2ℓ = W × V πn1 2 (kgf・m2) |
|
5. 원동기 정격 토크: Tn |
Tn = 9.55 × kW n1 (kN・m) |
Tn = 974 × kW n1 (kgf・m) |
|
6. 작용 토크: Tm |
Tm =
Ts(%) + T max (%)
2 × 100
× Tn (kN·m) |
Tm =
Ts(%) + T max (%)
2 × 100
× Tn (kgf·m) |
|
7. 시동 토크에 의한 체인 장력 : Fms |
Fms =
Ts(%) × i
{d/(2 × 1000)} × 100
× Tn × 1(kN) |
Fms =
Ts(%) × i
{d/(2 × 1000)} × 100
× Tn × 1(kgf) |
|
브레이크 토크에 의한 체인 장력: Fms |
Fmb =
T b (%) × i
{d/(2 × 1000)} × 100
× Tn × 1.2*(kN) *는 상수 |
Fmb =
T b (%) × i
{d/(2 × 1000)} × 100
× Tn × 1.2*(kgf) *는 상수 |
8. 가속 시간: ts |
ts = (Im + Iℓ) × n1 9550 × (Tm - Tℓ) (s) |
ts = (GD2m + GD2ℓ) × n1 375 × (Tm - Tℓ) (s) |
9. 감속 시간: t b ±: 매달림 하중 등의 마이너스 부하일 때는 |
tb = (Im + Iℓ) × n1 9550 × (Tb ± Tℓ) (s) |
tb = (GD2m + GD2ℓ) × n1 375 × (Tb ± Tℓ) (s) |
10. 가속도
직선 가속을 상정하고 있습니다. 그렇지 않으면 최대 가속도로 계산하십시오. |
선형 운동 (부하 가속도) αs = V ℓ ts × 60 회전 운동 (원동기 축의 각속도) ω = 2 π × n1 회전 운동 (원동기 축의 각가속도) ωs = ω ts × 60 |
|
11. 감속
직선 가속을 상정하고 있습니다. 그렇지 않으면 최대 감속도로 계산하십시오. |
선형 운동 (부하 감속) αb = V ℓ tb × 60 회전 운동 (원동기 축의 각속도) ω = 2 π × n1 회전 운동 (원동기 축의 각 감속도) ωb = ω tb × 60 |
|
12. 가속시의 체인장력:Fs |
선형 운동 Fs = M × αs 1000 + Fw 회전 운동 Fs = I ℓ × ωs × i 1000 × d 2 × 1000 + Fw |
선형 운동 Fs = M × αs G + Fw 회전 운동 Fs = GD 2ℓ /4 × ωs × i d 2 × 1000 × G + Fw |
감속시 체인 장력: Fb |
선형 운동 Fb = M × αb 1000 + Fw 회전 운동 Fb = I ℓ × ωb × i 1000 × d 2 × 1000 + Fw |
선형 운동 Fb = M × αb G + Fw 회전 운동 Fb = GD 2ℓ /4 × ωb × i d 2 × 1000 × G + Fw |
13. 보정 kW(일반 선정 시) |
보정 kW = 원동기 정격 kW × Ks (kW) | |
14. 보정 체인 장력 |
||
원동기로부터의 보정 체인 장력: F'm |
F'm = Fm × Ks × Kn × Kz (kN) {kgf} | |
시동 토크로부터의 보정 체인 장력: F'ms |
F'ms = Fms × K × Kn × Kz (kN) {kgf} | |
정동 토크로부터의 보정 체인 장력: F'mb |
F'mb = Fmb × K × Kn × Kz (kN) {kgf} | |
대차 구동 보정 체인 장력: F'c |
F'c = Fc × Ks × Kn × Kz (kN) {kgf} | |
가속시 보정 체인 장력: F's |
F's = Fs × Kn × Kz (kN) {kgf} | |
감속시의 보정 체인 장력: F'b |
F'b = Fb × Kn × Kz (kN) {kgf} | |
짐에서 보상 체인 장력: F'w |
F'w = M × Ks × Kn × Kz × G 1000 (kN) |
F′w = W(또는 Fw) × Ks × Kn × Kz(kgf) |
|
질량 M{중량 W}이 불명한 경우는, 원동기의 정격 토크 Tn으로부터 축 토크 T=Tn×i(kN·m){kgf·m}을 구하고, |
||
15. 관성비: R |
R = Iℓ Im |
R = GD2ℓ GD2m |
16. 관성 모멘트(I)와 탈모차 효과(GD 2)의 환산 |
1kg・m2...(I) | 4kgf・m2...(GD2) |
상기 계산식에서의 체인 장력은 모두 체인 1개로 사용할 때의 장력입니다.
2개 이상의 체인을 사용할 때는 언밸런스 하중 계수 Ku(표 4)를 곱하여 1개당 체인 장력을 산출합니다.
불균형 하중 계수 Ku
매달기용, 대차 구동 등으로 체인 2개 또는 4개로 매달아 대차 견인할 때는 체인의 작용 장력이 균등하게 되지 않습니다.
좌우의 언밸런스의 기준으로서 하기 언밸런스 하중 계수 Ku를 곱하여 1개당 체인 작용 장력을 구할 때 사용합니다.
(예) 4개 매달아에서 1개당 불균형 하중 계수
Ku = 0.6 × 0.6 = 0.36
| 2개 | 0.6 |
|---|---|
| 4개 | 0.36 |
