기술자료 직선 작동기 짚 체인 액추에이터 선정
선정표
오른쪽의 그래프는 스트로크와 기본 용량의 관계를 나타냅니다.
이 그래프에서 ZCA 1대당 필요한 추력과 사용 스트로크를 확인하여 형번을 결정해 주십시오.
상세한 검토가 필요한 경우, 아래의 계산에서 확인해 주십시오.

선정 방법
사용 기계..... 기계 구성, ZCA 사용 대수, 사용 환경 etc
하중 ...
설치 형상...
가동 속도.....ZCA 필요 속도
스트로크..... 실제로 사용하는 스트로크
1. 보정 하중 Fs의 산출
부하의 성질을 고려하여 서비스 요소 (표 1)를 참조한 후 보정 하중 Fs를 구합니다.
보정 하중 Fs N{kgf} = 필요 추력 PN{kgf}× 서비스 요소 Sf
표 1 서비스 요소
| 짐의 본질 | 사용 예 | 서비스 요소 Sf |
|---|---|---|
| 충격이 없는 원활한 작동 부하 관성 소 |
컨베이어 전환 | 1.0~1.3 |
| 가벼운 충격이 있는 작동 부하 관성 중 |
다양한 전송 장치 각종 리프터 승강 |
1.3~1.5 |
2. 1대당 필요추력 Fs1의 산출
보정 하중 Fs보다 1대당 필요한 추력 Fs1을 구합니다.
연동 운전의 경우는 연동 계수 (표 2)를 참조하여 계산합니다.
ZCA1대당 추력 Fs1 N{kgf} = 보정 하중 Fs N{kgf} ÷(연동 대수× 연동 계수 Fg)
표 2 연동 계수
| 연동 대수(대) | 1대 | 2대 | 4대 |
|---|---|---|---|
| 연동 계수 Fg | 1.0 | 0.83 | 0.69 |
3. 구동부 없음과 하이포이드 모터 부착 혹은 TERVO 부착 중 하나를 선택
4. 형번 가선정
기종 일람으로부터, 1대당의 추력 Fs1이 ZCA의 기본 용량 이하인 것을 확인합니다. 스트로크는 사용 스트로크에 여유를 기대해 주십시오.
[구동부 없음을 선택한 경우]
기종 일람으로부터, 1대당의 추력 및 허용 스트로크보다 형번 가선정합니다. 5항 이후로 진행하십시오.
[하이포이드 모터 부착・TERVO 부착을 선택한 경우]
기종 일람으로부터, 1대당의 추력, 체인 가동 속도 및 허용 스트로크를 만족하는 형번 가선정합니다.
9항 이후로 진행하십시오. 기종 일람은 하이포이드 모터 첨부(여기), TERVO 부착(여기)를 참조해 주십시오.
5. 최대 속도
최대 속도 이하인지 확인합니다.
6. 필요 입력 회전 속도 확인
가동 속도로부터 필요한 입력 회전 속도를 구합니다.
N = V×60/K N: 입력 회전 속도 r/min V: 가동 속도 mm/s K: 입력 축 1 회전당 짚 체인 이동량 mm (표 3)
7. 필요 입력 토크 확인
필요한 입력 토크를 계산합니다.
T = Fs1×Dp 2×1000×η + To
T:필요 입력 토크 N・m{kgf・m}
Fs 1: 1대당 필요추력 N{kgf}
D p: 스프로킷의 피치 원 직경 mm (표 3)
η : ZCA의 종합 효율 (표 3)
To : 평균 무부하 가동 토크 N·m{kgf·m} (표 3)
표 3 능력표
| 모델 | ZCA25 | ZCA35 | ZCA45 |
|---|---|---|---|
| 종합 효율 η | 90% | 90% | 90% |
| ※평균 무부하 가동 토크 To N·m{kgf·m} | 0.62{0.063} | 1.63{0.17} | 5.85{0.6} |
| 입력축 1회전당 이동량 Kmm | 95.3 | 142.9 | 240 |
| 스프로킷 피치 원 직경 Dp mm | Φ30.92 | Φ46.48 | Φ78.0 |
※무부하 시 입력축을 연속 회전하는 데 필요한 토크의 평균값입니다.
체인의 각 피치마다 맞물림으로 인한 토크 변동이 있습니다.
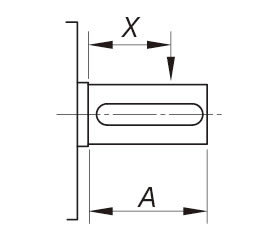
8. 허용 오버행 로드 검토
축을 체인, 기어, 톱니 벨트, V 벨트 등으로 구동하는 경우 오버행 로드가 허용치 이하인지 확인합니다.
OHL: 오버행 로드 N{kgf}
f: 전동 요소 계수 (표 4)
Lf:하중의 작용 위치에 따른 계수 (표 5)
T:필요 입력 토크 N・m{kgf・m}
D: 스프로킷, 기어, 풀리 등의 피치 원 직경 m
허용 OHL ≧ 2×T×f×Lf D
표 4 전동 요소 계수 (f)
| 체인 | 기어 톱니 벨트 | V 벨트 |
|---|---|---|
| 1.0 | 1.25 | 1.5 |
표 5 하중의 작용 위치에 따른 계수 (Lf)
| X/A | 0.25 | 0.5 | 0.75 | 1.0 |
|---|---|---|---|---|
| Lf | 0.9 | 1.0 | 1.15 | 1.25 |
표 6 허용 오버행로드
| 모델 | ZCA25 | ZCA35 | ZCA45 |
|---|---|---|---|
| 허용 오버행 로드 N{kgf} | 638{65.0} | 946{96.4} | 2065{210.5} |
9. 옵션 선택
사용 조건에 따라 옵션을 선택합니다.
- ・설치 베이스
- ・캡
- ・자바라
- ・급지 플레이트
10. 형번의 결정
11.필요 입력 용량의 산출(모터 없음의 경우)
필요 입력 용량 P kW = T×N/9550
주의:
필요 입력 토크 중 평균 무부하 가동 토크가 차지하는 비율이 25% 이상이 되는 경우 체인 특유의 맞물림 동작에 의한 토크 변동의 영향이 커집니다. 원활하게 가동시키기 위해서는 평균 무부하 가동 토크(표 3)를 1.5배로 선정해 주십시오.
필요 입력 토크 선정시의 주의
ZCA의 배치가 아래 그림과 같이 스트레이트형인 경우, 구동원에 의한 입력 토크가 허용 입력축 토크 이하인지 확인하십시오.

구동원측의 ZCA(1)에는 2대분의 필요한 입력 토크가 입력축에 전달됩니다.
이 2대분의 토크가 허용 입력축 토크 이하인지 확인하십시오.
ZCA(1)에만 필요한 입력 토크 T1
ZCA(2)에만 필요한 입력 토크 T2
구동원 필요 토크 TM = T1 + T2 < 허용 입력축 토크
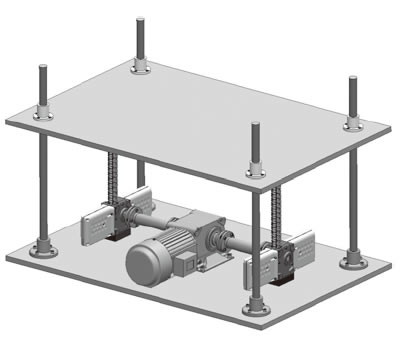
선정 예
사용기계..... 승강장치 ZCA2대 사용, 공장내(상온, 분진 없음)
필요한 추력..... 가벼운 충격이 있는, 1200N{122kgf}/2대, 브레이크 부착 소형 기어 모터는 별도로 연결하여 커플링으로 연결
설치 형상..... 가이드 폴 4개
가동속도..... 250mm/s
스트로크.....450mm
전원..... 200V/60Hz
| SI 단위 |
|---|
ZCA
모터(60Hz)
커플링
|
| {중력 단위} |
|---|
ZCA
모터(60Hz)
커플링
|
위치 제어가 필요한 경우는 엔코더 부착 모터 혹은 서보 모터를 사용해 주십시오.
(엔코더 부착 모터를 희망하시는 경우는 별도 상담해 주십시오.)
선정 예는 일례이므로 커플링, 마이터기어박스, 모터 선정 시에는 전용 카탈로그를 참조하십시오.
구동부
하이포이드 모터 TA・TR 시리즈
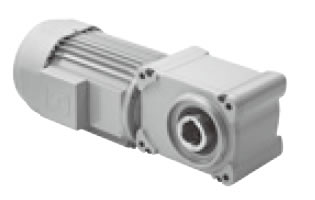
- ・고효율의 하이포이드 기어를 채용해, 높이 치수를 억제한 컴팩트한 소형 기어드 모터입니다.
- ・독자적인 그리스 누설 대책으로 사용하기 쉽고, 엔코더 부착 사양을 병용하면 다점 위치 결정 제어도 간단.
마이터기어박스
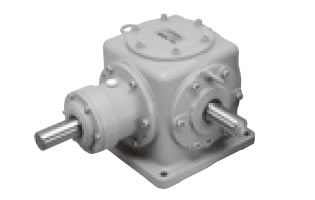
- ・ 마이터기어박스는 복수의 짚 체인 액추에이터를 동기 운전하는 경우에 사용합니다.
- ・사이즈, 축 배치, 속비, 재질 등 표준 기종으로 풍부한 바리에이션을 갖추고 있습니다.
엑트플렉스 커플링

- ・무윤활로 고정밀 커플링으로 서보 모터 구동에도 최적입니다.
- ・키홈・클램프・테이퍼 락 등 풍부한 축 체결 방식과 1㎜ 단위의 세세한 축 구멍 가공에 대응합니다.
