기술자료 직선 작동기 리니파워잭 선정
요건
사용 기계..... 테이블 리프터, 무대 승강 장치, 컨베이어 라인 전환 장치 etc
레이아웃..... 연동 패턴(4대, 6대 etc), 구동, 커플링 etc
최대 하중(W)..... 부하 또는 워크의 질량 N{kgf}
나사축 속도(V)..... 잭 필요 속도 m/min
스트로크..... 실제로 사용하는 스트로크 mm
나사 타입..... 볼 나사 타입 (JWB), 고납 볼 스크류 타입 (JWH), 사다리꼴 나사 타입 (JWM)
설치 형태.....
설치 상태..... 베이스 고정, 축단 클레비스 etc·압축 하중 작용시는 좌굴 검토
기대 수명..... 잭 수명 (JWB, JWH 전용)
선정 절차
1. 보정 하중 Ws의 산출
부하의 성질을 고려하여 서비스 요소 (표 1)를 참조한 후 보정 하중 Ws를 구합니다.
보정 하중 Ws (N{kgf}) = 최대 하중 W (N{kgf})× 서비스 요소 Sf
표 1 서비스 요소 Sf
| 짐의 본질 | 사용 예 | 서비스 요소 |
|---|---|---|
| 충격이 없는 원활한 작동 부하 관성 소 |
밸브 개폐 컨베이어 전환 장치 |
1.0~1.3 |
| 가벼운 충격이 있는 작동 부하 관성 중 |
각종 이동 장치 각종 리프터 승강 |
1.3~1.5 |
| 큰 충격, 진동이 있는 작동 부하 관성 큰 |
대차에 의한 물체 반송, 압연 롤러의 위치 결정 유지 | 1.5~3.0 |
주) 상기 서비스 요소는 일반적인 기준이며, 사용 조건을 고려하여 결정해 주십시오.
2. 잭 1대당 하중 W의 산출
보정 하중 Ws에서 잭 1대당 하중 W를 구합니다. 연동 운전의 경우는 연동 계수 (표 2)를 참조하여 계산합니다.
잭 1대당 하중 W(N{kgf}) = 보정 하중 Ws (N{kgf}) 잭 사용 대수× 연동 계수 fd
표 2 연동 계수 fd
| 연동 대수(대) | 2 | 3 | 4 | 5~8 |
|---|---|---|---|---|
| 연동 계수 | 0.95 | 0.9 | 0.85 | 0.8 |
3. 리니파워잭 의 형번 가선정
「가선정의 포인트」를 참고로 잭의 형번을 가선정합니다.
임시 선정 포인트
- 1. 웜속비는 나사축속도보다 가선정합니다. 판단이 어려운 경우는 속비 H로 검토합니다.
- 2. 스트로크는 사용 스트로크에 여유를 예상하여 선정합니다.
- 3. 필요에 따라 옵션을 선택합니다.
4. 좌굴·나사축 회전 속도 확인
5. 필요 입력 회전 속도 확인
필요한 나사 축 속도보다 잭의 필요 입력 회전 속도를 구합니다.
N = V ℓ ×R
N: 입력 회전 속도 r/min
V:나사축 속도 m/min
ℓ:나사 리드 m
R: 웜 속도 비율
6. 필요 입력 토크 확인
필요한 입력 토크를 계산합니다.
T = W×ℓ 2×π×R×η + To
T:필요 입력 토크 N・m{kgf・m}
W: 승강 하중 N{kgf}
ℓ:나사 리드 m
π: 원주율 3.14
R: 웜 속도 비율
η: 잭 종합 효율
To:무부하 공전 토크 N・m{kgf・m}
- 주)
나사 리드, 웜 속도비, 종합 효율, 무부하 공전 토크는 각 제품의 주요 제원 페이지를 참조하십시오.
나사 리드의 단위에 주의해 주십시오. 예) 8mm → 0.008m
7. 필요한 입력 용량 확인
SI 단위 P = T×N 9550
중력 단위 P = T×N 974
T:필요 입력 토크 N・m{kgf・m}
P:필요 입력 용량 kW
N: 입력 회전 속도 r/min
8. 허용 오버행 로드 검토
입력축에 스프로킷, 기어, 벨트 등을 설치하는 경우는 허용 오버행 로드 이하가 되어 있는지 확인합니다. (여기 참조)
허용치를 초과하면 잭의 크기를 올리고 다시 계산합니다.
9. 수명 확인(JWB・JWH 타입만)
예상 수명을 만족하는지 확인합니다. (여기 참조)
기대 주행거리를 길게 하는 경우는 잭의 사이즈를 올려 재계산합니다.
※JWM(사다리꼴 나사) 타입은 수명 계산은 할 수 없습니다.
10. 옵션 결정
사용 조건에 따라 옵션을 선택합니다.
- ・출력 옵션 ・설치 옵션
- · 제어 옵션 · 입력 옵션
- ・부속 옵션
(각 제품의 도면라이브러리 참조)
11. 잭 본체 형번의 결정
리니파워잭 본체의 정식 형번을 결정합니다.
주변기기 선정
모터 선정
연동용 구동원 필요 용량 Pt를 산출하여 구동원을 선정
1. 구동원의 총 필요 토크 Tt의 산출
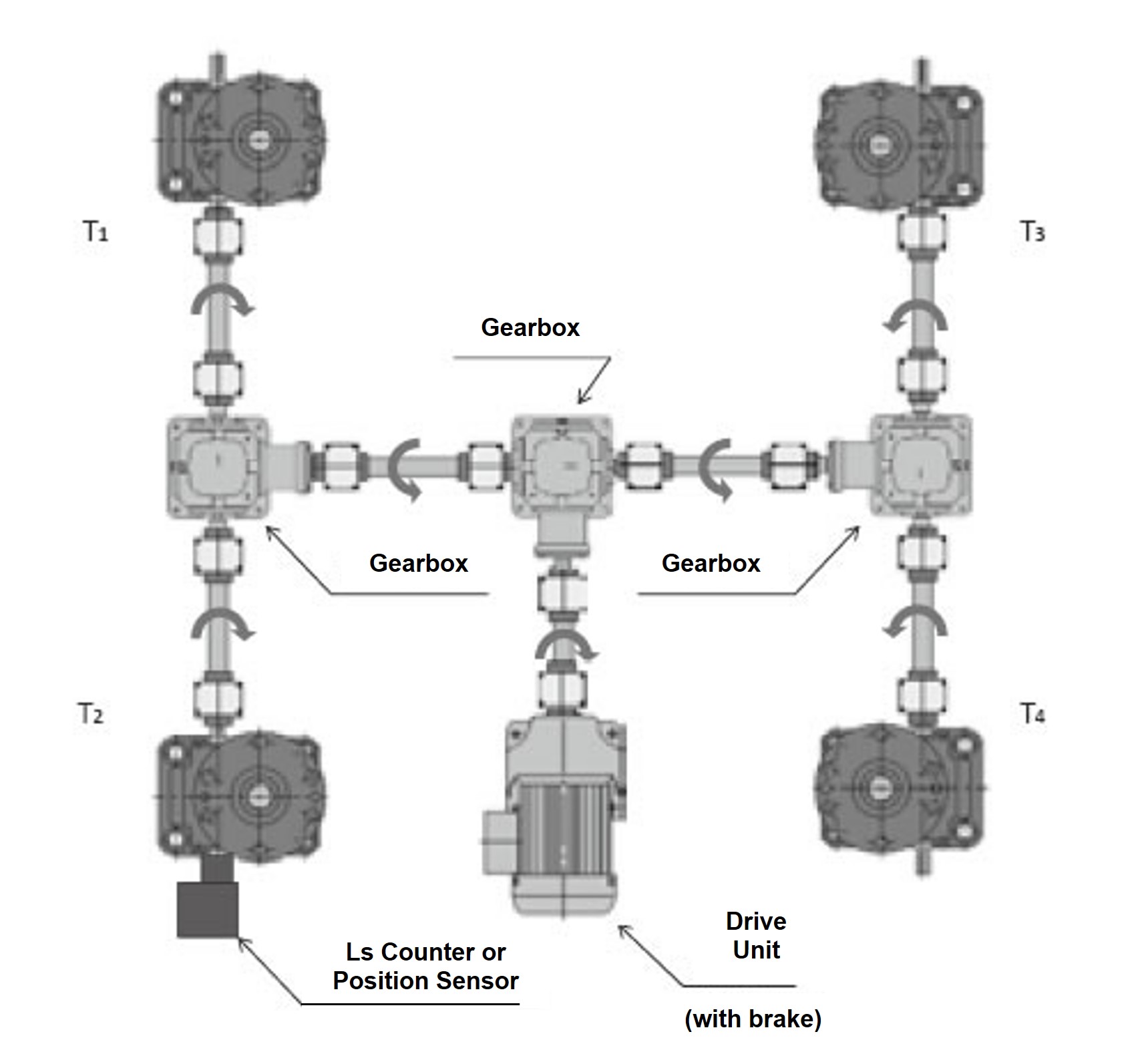
각 잭 1대당 구동원측에서 필요한 토크 T 1~4를 구하고, 이들을 합하여 구동원의 총 필요 토크 Tt를 구합니다.
[잭 1대당 필요토크]
T 1~4 = T (기어박스 효율) 기어박스의 대수
[구동원의 총필요토크]
Tt = T1 + T2 + T3 + T4
T 1~4: 각 잭의 구동원측에서의 필요 토크 N·m{kgf·m}
T:잭 본체의 필요 입력 토크 N・m{kgf・m}
기어 박스 효율 : 일반적으로 0.9입니다.
Tt:구동원의 총필요 토크 N・m{kgf・m}
4대 연동(그림 1)의 경우, T 1~4 = T0.9 2 입니다.
그림 1
2. 허용 입력축 토크의 확인
잭 필요 입력 토크가 선정한 잭의 허용 입력축 토크 이하인지 확인합니다.
예)
잭의 배치가 그림 2와 같이 스트레이트형인 경우, 구동원측의 잭에는 2대분의 필요한 입력 토크가 입력축에 전달됩니다.
이 2대분의 토크가 허용 입력축 토크 이하인지 확인합니다.
그림 2
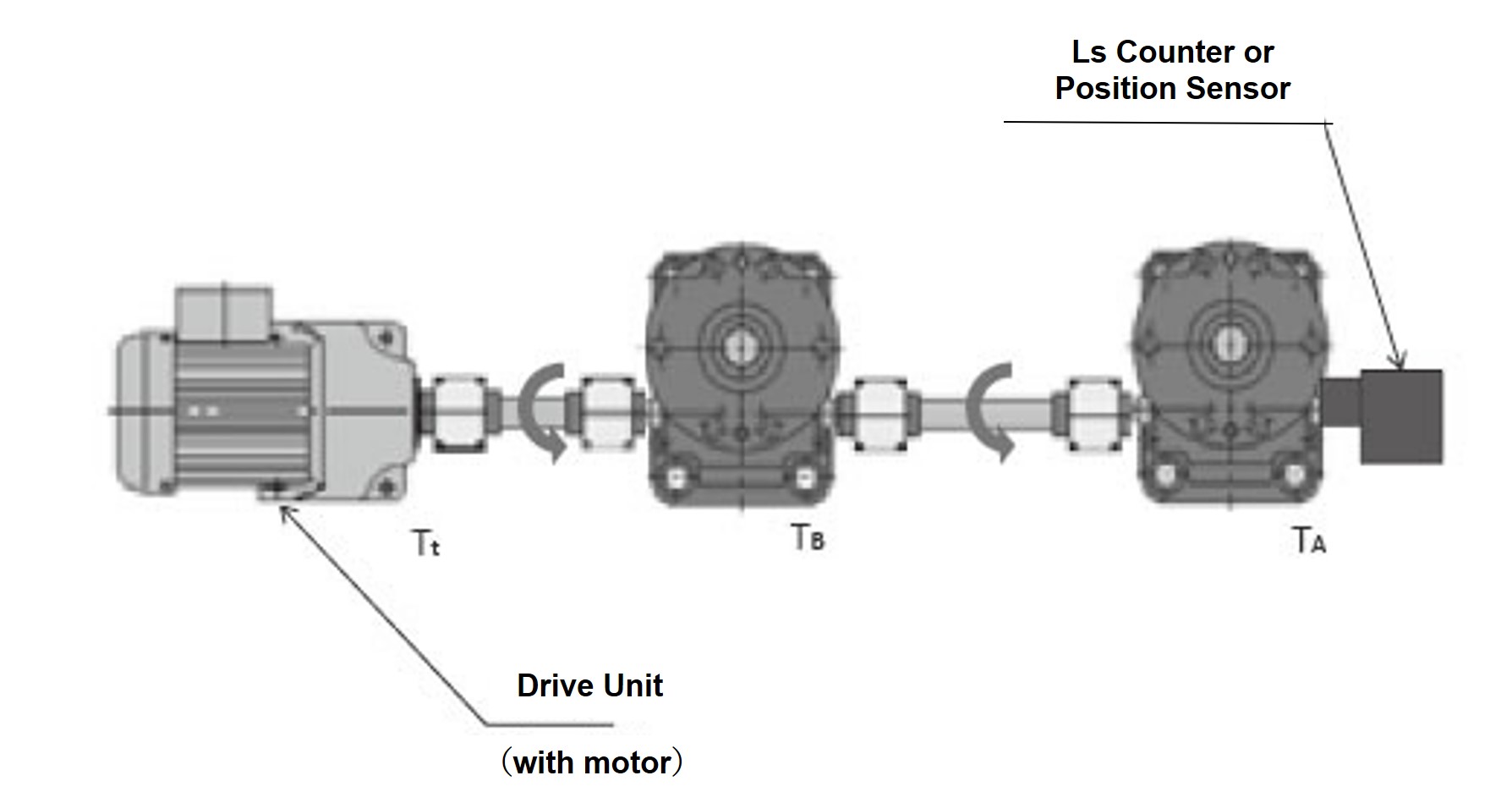
잭 A만 필요 토크 T A
잭 B만 필요 토크 T B
구동원 필요 토크 T t = T A + T B < 허용 입력축 토크
3. 구동원 필요 용량 Pt의 산출
입력 회전 속도 N과 1에서 구한 총 필요 토크 Tt로부터 구동원 필요 용량 Pt를 구합니다.
SI 단위 Pt= Tt×N 9550
중력 단위 Pt = Tt×N 974
Pt: 구동원 필요 용량 kW
Tt:구동원의 총 필요 토크 N・m{kgf・m}
N: 잭 입력 회전 속도 r/min
기타 기기 선택
기어 박스
입력 회전 속도와 허용 토크에서 선정합니다.
쯔바키 마이터기어박스의 단권 카탈로그를 참조하십시오.
커플링
허용 토크와 최대 축경에서 선정합니다.
쯔바키 커플링의 단권 카탈로그를 참조해 주십시오.
리니 파워 리니파워잭 선정 예
예제:
4대 연동 압상 리프터(레이아웃은 아래 그림의 4대 연동 패턴과 동일) 공장내 상온, 분진 약간 있음
횡하중 대책은 리프터 장치측에서 가이드 설치, 베이스 고정-축단 지지/고정의 설치 상태, 전원은 3상 220V/60HZ
사용 빈도는 2회 작동/시간×8시간/일×300일/년×3년 사용
- (1)최대하중:98.0kN{10tf}/4대
- (2)필요속도:5mm/s(0.3m/min)
- (3)사용 스트로크:260mm
4대 연동 패턴
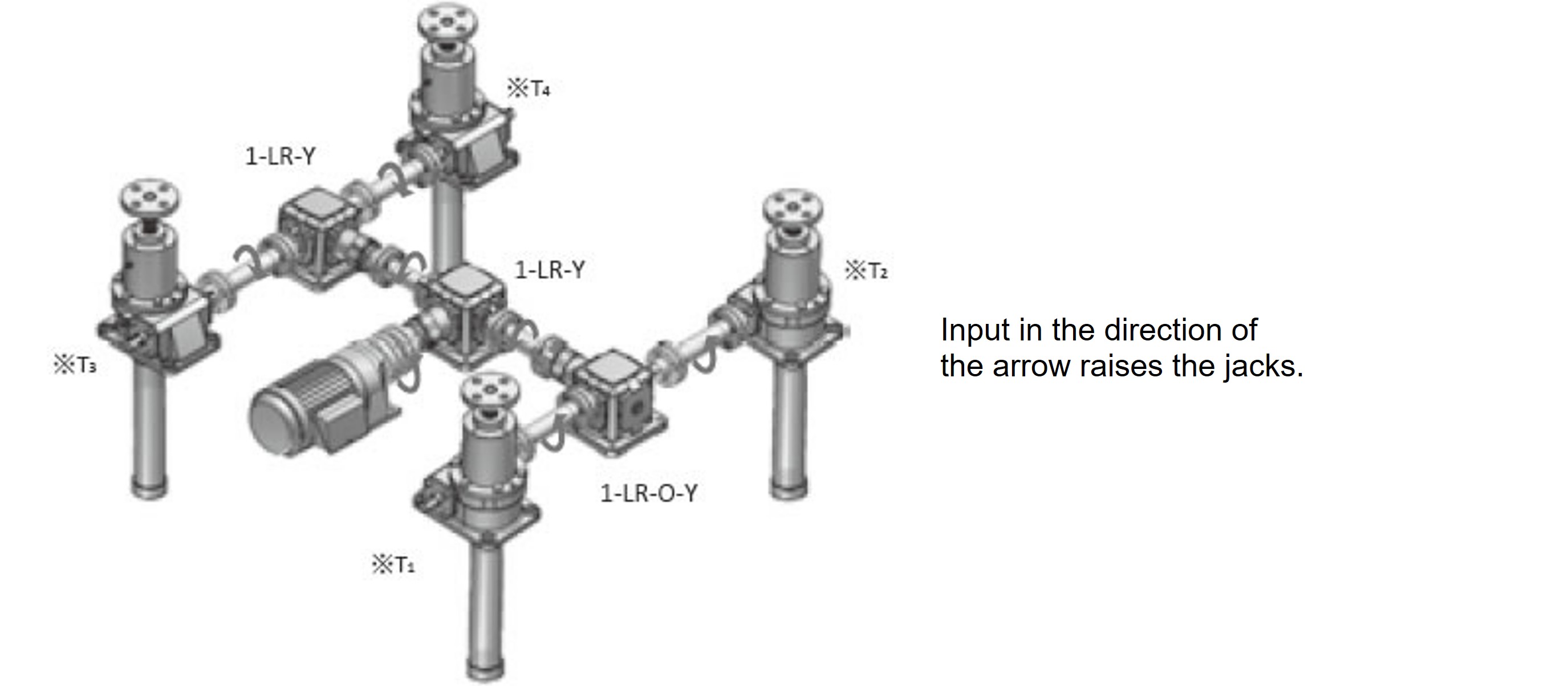
※T1~4는 상기 참조
| SI 단위 |
|---|
|
| {중력 단위} |
|---|
|
주변기기의 선정예
A. 구동원 결정
1. 각 잭의 구동원측에서의 필요 토크 T 1(2.3.4)
잭 4대 모두 분산 경로는 같기 때문에
SI 단위 Tt= T1 ×4=83.5N・m
중력 단위 Tt = T 1 × 4 = 8.52kgf·m
2. 잭의 최대 허용 입력축 토크의 검토
이번 연동 패턴에서는 잭이 직렬로 2대 이상 나란히 없기 때문에 검토 불필요.
3. 구동원 필요 용량 Pt
또한 입력 회전수 180r r/min부터
1800 180 = 10이상에서 2.2kW 브레이크 장착 기어 모터 쯔바키 GMTR221-42L10B를 선정합니다.
자세한 내용은 쯔바키 소형 기어모터 카탈로그를 참고해 주십시오.
B.1. 기어 박스는 입력 회전 속도 180 r/min,
잭 필요 입력 토크 15.4N・m{1.57kgf・m}보다
1-1. 잭측 좌우의 기어 박스는 잭 2대분의 토크
20.9×2
0.9
= 46.4N・m
2.13×2
0.9
= 5.11kgf・m
를 클리어할 기어박스 ED4M을 선정합니다.
(단, 기어 박스의 회전 방향에 주의해 주십시오.)
1-2. 기어 모터 틀측 기어 박스는 잭 4대분이므로 토크
20.9×4
0.9 2
= 103N・m
2.13×4
0.9 2
= 8.69kgf・m
를 클리어하는 기어 박스 ED6M이 선택됩니다.
잭 측 기어 박스
- 왼쪽: ED4M 1-LR-OY
- 오른쪽: ED4M 1-LR-Y
기어 모터 측 기어 박스
- ED6M 1-LR-Y
(자세한 것은 마이터기어박스 카탈로그를 참조하십시오)
B.2.장치 조건에 맞추어 각종 커플링을 선택해 주십시오.
(자세한 것은 쯔바키 커플링 카탈로그를 참조해 주십시오)
검토 방법으로는
2-1 잭-기어 박스 사이는 잭 필요 입력 토크 16.9N·m{1.73kg·fm} 및 잭 입력 축 직경(JWB050USH는 Φ20), 기어 박스 축 직경(ED4M은 Φ19)에서 선택해 주십시오.
필요한 수는 2×2×2 = 8개입니다.
2-2 기어박스 상호간은 잭 2대분의 토크
20.9×2 0.9 = 50.1N・m 2.13×2 0.9 = 5.11kgf・m및 잭측 기어 박스 축경(ED4M은 Φ19), 기어 모터 틀측 기어 박스 축경(ED6M은 Φ25)에서 선택해 주십시오.
필요한 수는 2×2 = 4개입니다.
2-3 기어 박스 -기어 모터 사이는 잭 4대분의 토크
20.9×4 0.92 = 85.2N・m 2.13×4 0.92 = 8.69kgf・m및 기어 박스 축경(ED6M은 Φ25), 기어 모터 출력 축경(GMTR221-42L10B는 Φ42)에서 선택해 주십시오. 필요한 수는 2개입니다.
