기술자료 클러치 선정
선정 순서나 주의사항 등을 보시고 싶은 분은 아래로 진행하십시오.
제품 시리즈의 좁히기나 가선정을 희망하시는 분은
여기를 클릭하십시오.
선정 방법
캠 클러치의 용도 (오버 러닝 인덱싱 백 스톱)를 명확히하십시오. 용도별로 선정법이 다르므로 각각의 순서에 따라 캠 클러치를 선정해 주십시오. 덧붙여 아래의 형번의 경우는 당사에 연락해 주십시오.
- (1) 캠 클러치 박스
- (2) 스토퍼 부착 이송 (인덱싱)에 사용되는 클러치
1. 오버런닝의 경우
- (1) 캠 클러치에 걸리는 토크를 아래의 계산식에서 산출해 주십시오.
토크 계산식
SI 단위 T = 60000 × kW 2 π × N × Sf(N·m)
{중량 단위} T = 974 × kW N × Sf {kgf·m}
T 캠클러치에 걸리는 토크(N・m) kW 캠 클러치 축의 전달 동력 (kW) N 캠 클러치 축의 회전 속도(r/min) S.f 서비스 요소 (아래 표) 서비스 요소 표
조건 S.f 충격 토크 없음 1~1.5 약간 충격 토크 있음 1.5~2.5 충격 토크 있음 2~3 강도의 충격 토크 있음 4~6 - (2) 최고 공전 회전 속도
- (3) 축 구멍 직경
- (4) 설치법
- (5) 기타 (분위기 조건, 유지 보수 등)
이상의 조건을 만족하는 형번을 오버런닝용 클러치(상기 용도별 적합 시리즈 일람표 및 각 게재 페이지 참조) 중에서 선정해 주십시오.
| 시리즈 | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 용도 | MZ MZ-G |
BB | PB | 200 | LD | ML | MG | MI | MX | MI-S | BS | BR BR(P) |
MG-R | MA | MR | 캠 클러치 박스 |
MZ-C | MG-C | |
| 2원 구동 · 이속 구동 |
고속 공전 · 고속 맞물림 | ○ | ◎ | ○ | |||||||||||||||
| 고속 공전·중저속 맞물림 | ◎ | ◎ | ◎ | ||||||||||||||||
| 고속 공전·저속 맞물림 | ◎ | ◎ | ◎ | ◎ | |||||||||||||||
| 중저속 공전·중저속 맞물림 | ◎ | ○ | ○ | ○ | ○ | ○ | ○ | ◎ | ○ | ||||||||||
| 정회전 맞물림, 역회전 공전 | ◎ | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ◎ | ○ | |||||||||
| 프리휠링 | ◎ | ○ | ○ | ○ | ○ | ○ | ○ | ◎ | ◎ | ○ | |||||||||
| 수동식 | ○ | ○ | ○ | ◎ | ◎ | ○ | |||||||||||||
서비스 요소 (Sf)가 불명한 경우는, 이하의 순서로 계산해 주십시오.
Sf = 원동기 정격 토크 기동 % × 충격 계수 (최대 2.5)
충격계수는
관성비 =
부하측 전관성 모멘트
(클러치 축 환산)
입력측 전관성 모멘트
(클러치 축 환산)
그리고 아래 그림에서 구하십시오.
충격 계수

2. 인덱싱의 경우
2.1 인덱싱 이송용 캠 클러치
- (1) 캠 클러치에 걸리는 토크 A식 또는 B식으로 구해 주십시오.
주) 크랭크 기구에 의하지 않는 인덱싱의 경우에는 위 식은 적용할 수 없습니다. A식
T = I・θ・N2 101750 + TB
T 캠클러치에 걸리는 토크 N·m I 부하측의 전관성 모멘트(캠 클러치축 환산) kg・m 2 θ 단일 이송 각도 (도) (캠 클러치 축 변환) N 분당 인덱싱 빈도 (회 / 분) TB 부하측의 브레이크 토크 N·m(캠 클러치축 환산) B식
T = 60000 × P 2π × n ・ ℓ2 ℓ1 × 2.5
T 캠클러치에 걸리는 토크 N·m P 전달 동력 kW n 크랭크축 회전 속도 r/min ℓ1 크랭크 길이 m ℓ2 스윙 암 길이 m 2.5 계수 - (2) 최고 인덱싱 빈도
- (3) 이송 각도 (θ) MI-S 시리즈 이외는 90 ° 이하
- (4) N × θ ≤ 20000 (고, 중, 저속, 이송 각도가 작은 경우)
N × θ ≤ 50000(저속·이송 각도대의 경우) - (5) 기대 정밀도
특히 고정밀도의 이송을 기대하는 경우는 MX 시리즈를 사용해 주십시오.
아울러 역전 방지용 클러치나 브레이크도 고정밀도의 것을 사용해 주십시오. - (6) 축 구멍 직경
- (7) 설치 방법
- (8) 기타 (수명, 유지 보수 등)
이상의 조건을 만족하는 형번을 인덱싱용 캠 클러치(하기 용도별 적합 시리즈 일람표 및 각 게재 페이지 참조) 중에서 선정해 주십시오.
| 시리즈 | ||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 용도 | MZ MZ-G |
BB | PB | 200 | LD | ML | MG | MI | MX | MI-S | BS | BR BR(P) |
MG-R | MA | MR | 캠 클러치 박스 |
MZ-C | MG-C |
| 고속・이송 각도:소 | ◎ | |||||||||||||||||
| 중저속·이송 각도:소 | ○ | ○ | ○ | ○ | ○ | ○ | ◎ | ○ | ○ | |||||||||
| 저속・이송 각도:대 | ◎ | |||||||||||||||||
| 간헐 이송의 역전 방지 | ○ | ○ | ○ | ○ | ○ | ○ | ◎ | ◎ | ○ | |||||||||
| 스토퍼 부착 이송 | 당사에 상담해 주십시오. | |||||||||||||||||
| 변속용 | ○ | ○ | ○ | ○ | ○ | ○ | ○ | ◎ | ||||||||||
2.2 간헐 이송의 백 스톱의 경우
이송용 캠 클러치와 동일 형번, 또는 1랭크 작은 형번을 사용해 주십시오.
또한 MX 시리즈를 사용하는 경우 아래 그래프의 각 곡선 아래쪽 범위에 있는지 확인하십시오.
MX 시리즈 사용 범위
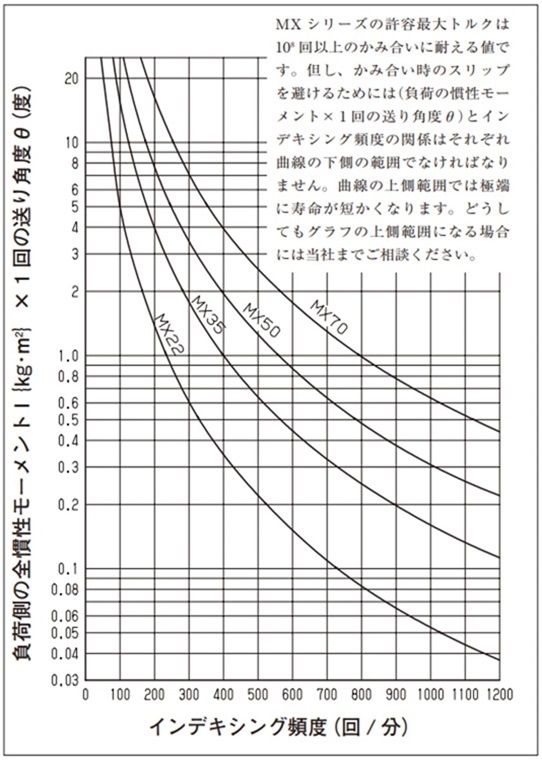
[클릭으로 확대]
3. 백 스톱의 경우의 선정법
3.1 캠 클러치에 걸리는 토크 계산
(1) 벨트 컨베이어의 역전 방지의 경우
[순서 1] 무부하 동력(P1)의 산출. P 1 = 0.06 × f × W × V × ℓ + ℓ 0 367 (kW)
[순서 2] 수평 부하 동력(P2)의 산출. P 2 = f × Qt × ℓ + ℓ 0 367 (kW)
[순서 3] 수직 부하 동력(P3)의 산출. P 3 = h × Qt 367 (kW)
[순서 4] 역전동력(Pr)의 산출. Pr = P 3- 0.7(P 1 + P 2)(kW)
[순서 5] 역전 토크(T)의 산출. SI 단위 T = 60000 × Pr 2 π × N × Sf(N·m) {중량 단위} T = 974 × Pr N × Sf{kgf·m}
- f = 롤러의 회전 마찰 계수
= 0.03(일반 값) - W = 운반물 이외의 운동부의 질량 {kg/m}
(벨트 폭에 따라 아래 표의 값을 사용)벨트 폭 mm 400 450 500 600 750 900 1050 1200 1400 1600 1800 2000 질량 W 22.4 28 30 35.5 53 63 80 90 112 125 150 160 - V = 컨베이어 속도 m/min
- Qt = 최대 반송량 t/h
- h = 양정 m
- ℓ = 머리와 꼬리 벨트 차 사이의 수평 중심 거리 m
- ℓ 0 = 중심 거리 보정 계수 m
= 49m(일반값) - N = BS 캠 클러치 장착축의 회전 속도 r/min
- Sf = 서비스 요소
(하중이 걸리는 빈도에 따라 아래 표의 값을 사용)1일 수회 정도 이하 1.5 1일 수회 정도 이상 2.0
(2) 버킷 엘리베이터의 역전 방지의 경우
[순서 1] 역전 토크(T)의 산출. SI 단위 T =
(L + D) × Qt × D × 9800
120 × V
× Sf(N・m)
{중량 단위} T =
(L + D) × Qt × D × 1000
120 × V
× Sf{kg・m}
[순서 2] 상기 역전 토크(T)가 허용 최대 토크 이내에 있는 사이즈를 선택해 주십시오.
- 주) 1. 역전 토크 계산 시 최대 반송량(Qt)은 그 컨베이어의 능력에서 생각할 수 있는 최대값을 채용하는 것을 권장합니다. 컨베이어의 갑작스런 역전은 종종 컨베이어가 역량의 하중이 될 때 발생합니다.
- 주) 2. 상기 이외의 컨베이어의 경우는 별도의 컨베이어 고유의 계산식에 따라 역전 토크를 산출해 주십시오. 이 경우에도 해당 컨베이어의 용량이 가득 찬 것을 가정하여 계산하십시오.
- L = 양정 m
- D = 머리 컨베이어 사슬차의 피치 원 직경 m
- Qt = 최대 반송량 t/h
- V = 컨베이어 속도 m/min
- Sf = 서비스 요소
(하중이 걸리는 빈도에 따라 아래 표의 값을 사용)1일 수회 정도 이하 1.5 1일 수회 정도 이상 2.0
- T = 원동기 트립 토크
- kW = 모터 용량(kW)
- N = 캠 클러치의 공전 회전 속도 r/min
- S = 모터의 정동 토크 %
- Tmax = 카탈로그 허용 최대 토크
(3) 원동기 트립에 의한 선정
반송시의 트러블 또는 결선 미스 등으로 구동 모터가 트립하여 정지할 가능성이 있을 때는 다음 식에 따라 선정해 주십시오.
SI 단위 T = 60000 × kW 2 π × N × S 100 ≦ Tmax(N·m)
{중량 단위} T = 974 × kW N × S 100 ≦ Tmax {kgf·m}
주) 상기 선정식은 BS시리즈용이므로 다른 시리즈의 경우는 당사에 상담해 주십시오.
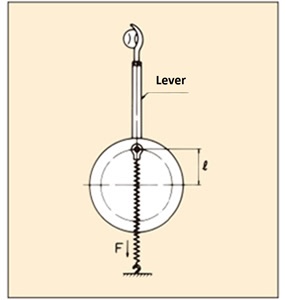
(4) 반복 충격 하중을 수반하는 백 스톱의 경우 (테니스 머신 · 피칭 머신 등)
필요한 토크 계산
T = F × ℓ × 3.0
- T:캠 클러치에 걸리는 토크(N・m)
- F:스프링의 최대 인장력(N)
- ℓ:편심량(하중)
- 3.0: 계수
3.2 공전 회전 속도
3.3 축 구멍 직경
3.4 설치 방법
역전 방지 토크 1회전 속도의 조견표
(MG-R의 r/min은 연속 공전의 경우입니다)
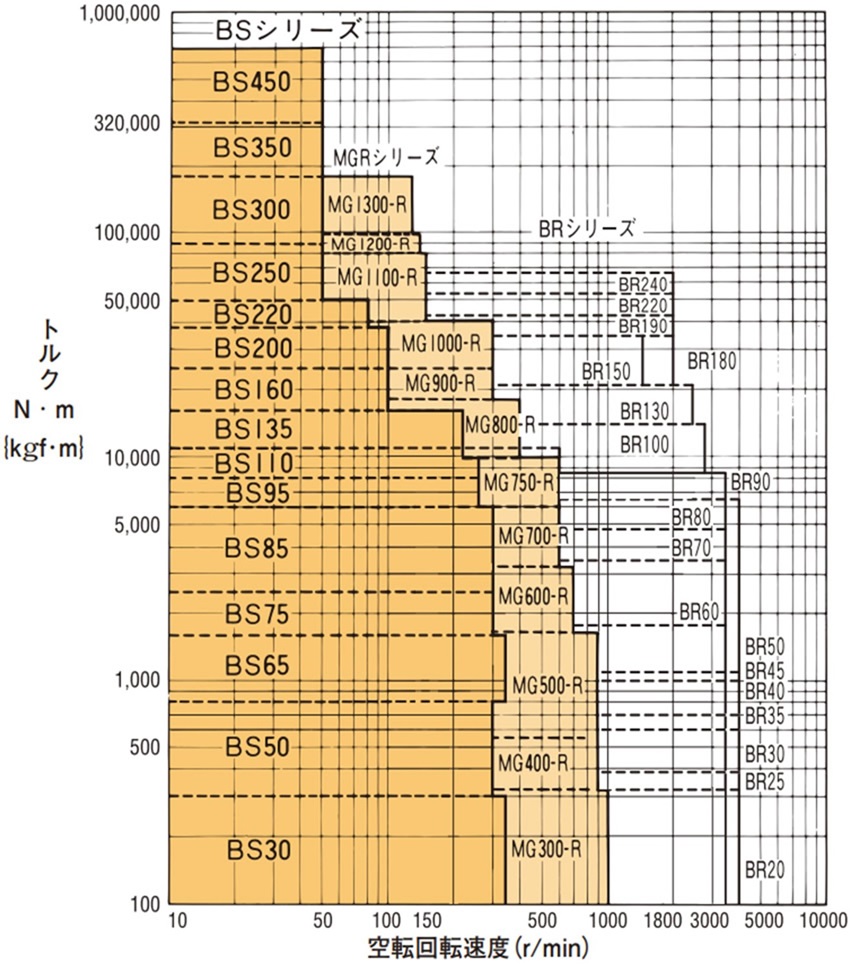
[클릭으로 확대]
