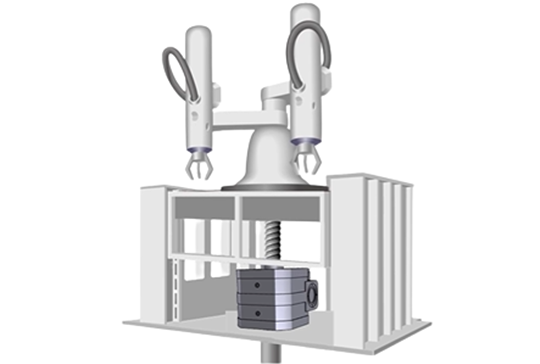
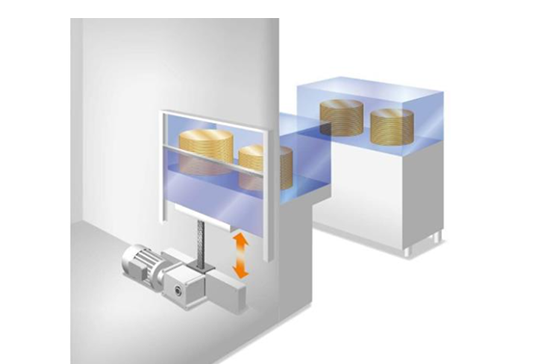
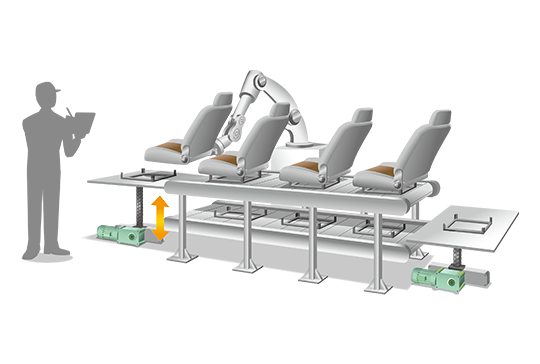
스칼라 로봇을 리니스피드잭으로 승강시켜 승강 스트로크의 연장을 실현
리니스피드잭
개요
스칼라 로봇의 Z축 이동량을 보완할 목적으로 리니스피드잭이 채용되었습니다. 로봇 단체에서는 부족했던 승강 스트로크를, 장치 전체의 레이아웃 제약을 해치지 않는 저상 구조에 의해 충분히 확보하고 있습니다. 또한, 서보 모터 구동에 의한 로봇과의 연동 제어를 실시함으로써, 고속이고 부드러운 상하 동작을 실현하고, 반송 동작 전체의 택트 타임 단축에도 공헌하고 있습니다.
과제
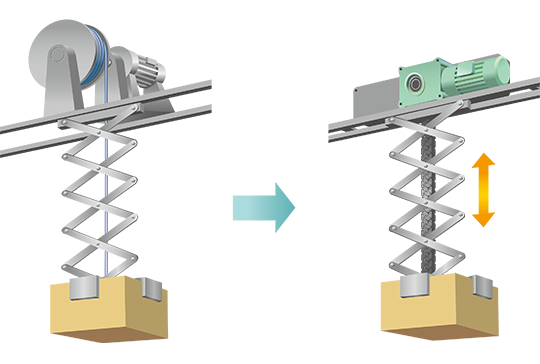
스칼라 로봇에는 Z축 이동 기구를 갖춘 기종도 있습니다만, 승강량에는 한계가 있어, 공정에 따라서는 필요한 스트로크를 확보할 수 없는 경우가 있었습니다. 외장 기구를 추가하는 경우에도, 통상의 스크류 잭에서는 고속성이나 로봇과의 동기성, 설치 스페이스의 확보가 과제가 되고 있었습니다.
채용 제품
리니스피드잭
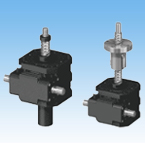
서보 모터의 성능을 최대한 활용할 수 있는 볼 나사 승강 유닛입니다.
리니스피드잭은 최고 200mm/s의 운전 속도와 최고 100%ED의 부하시간률 달성하여 장치의 생산성 향상에 대응할 수 있습니다.
운전 속도를 올려도 종래의 잭보다 소형 사이즈로 대응할 수 있어 한층 더 신개발 구조에 의해 저상화를 실현. 장비의 소형화에 기여합니다.
제품 채용에 의한 효과
리니스피드잭을 채용함으로써 로봇의 Z축 이동량을 초과하는 스트로크를 확보할 수 있어 공정 대응력이 향상되었습니다. 또한 저층 구조로 인해 전체 장치를 대형화하지 않고 통합할 수 있어 레이아웃의 자유도 향상과 생산성 개선의 양립을 실현했습니다.
쯔바키는 귀사의 곤란해 짐 해결을 전력으로 서포트하겠습니다.
어떠한 고민이라도 부담없이 연락주십시오.
채용 제품의 자세한 것은 이쪽
상담은 이쪽
같은 업계의 솔루션 사례
-
팔레트 승강 장치의 탈유압과 설계·조립 공수의 대폭 삭감을 실현
 과제고속, 고주파, 탈공 유압산업기타용도직선 이동제품직선 작동기
과제고속, 고주파, 탈공 유압산업기타용도직선 이동제품직선 작동기 -
케이블 내구 시험기의 탈유압으로 기름 누출과 산재 위험을 해소
 과제고속, 고주파, 탈공 유압산업기타용도직선 이동제품직선 작동기
과제고속, 고주파, 탈공 유압산업기타용도직선 이동제품직선 작동기 -
옥외의 전동부에 내환경 드라이브체인 채용해 방청성과 고강도를 양립
 과제유지 보수, 수명산업기타용도동력을 전달하기제품드라이브체인
과제유지 보수, 수명산업기타용도동력을 전달하기제품드라이브체인 -
전동 실린더의 방수·방식 대책으로 물이 닿는 환경에서도 안정 구동
 과제탈공 유압, 부식, 물이 걸린다산업기타용도직선 이동제품직선 작동기
과제탈공 유압, 부식, 물이 걸린다산업기타용도직선 이동제품직선 작동기 -
킬른의 체인 회전기구에서 치아 날아와 기어 파손을 해결
 과제미끄러짐산업기타용도회전·감속시키기제품핀기어드라이브
과제미끄러짐산업기타용도회전·감속시키기제품핀기어드라이브 -
타이어 마찰 구동에서 드럼 회전에 대한 미끄러짐 문제 해결
 과제미끄러짐산업기타용도회전·감속시키기제품핀기어드라이브
과제미끄러짐산업기타용도회전·감속시키기제품핀기어드라이브 -
드럼 회전 기구로 파쇄된 분말이 기구에 막히는 문제를 해결
 과제기타산업기타용도회전·감속시키기제품핀기어드라이브
과제기타산업기타용도회전·감속시키기제품핀기어드라이브 -
외팔보에 의한 승강 테이블의 기울기 개선과 메인터넌스 삭감에 성공
 과제유지보수산업기타용도직선 이동제품직선 작동기
과제유지보수산업기타용도직선 이동제품직선 작동기
동일한 과제로 솔루션 사례
-
클린 환경하의 승강 장치로 저발진과 공간 절약 자동화를 동시에 실현
 과제공간 절약, 마모 분말, 발진산업액정 · 반도체 · 전자 기기 · 통신용도직선 이동제품직선 작동기
과제공간 절약, 마모 분말, 발진산업액정 · 반도체 · 전자 기기 · 통신용도직선 이동제품직선 작동기 -
공간 절약 리프터로 팔레트 순환 시스템을 콤팩트화
 과제공간 절약산업자동차 산업용도직선 이동제품고속 리프터
과제공간 절약산업자동차 산업용도직선 이동제품고속 리프터 -
리프터의 승강 지그 형상의 특형 대응으로 설비의 공간 절약화를 실현
 과제공간 절약산업액정 · 반도체 · 전자 기기 · 통신용도직선 이동제품고속 리프터
과제공간 절약산업액정 · 반도체 · 전자 기기 · 통신용도직선 이동제품고속 리프터 -
기존 리프터에서는 어려웠던 고양정·공간 절약·고속·다점 정지를 실현
 과제공간 절약, 장스트로크, 고속, 고주파산업철강·비철용도직선 이동제품고속 리프터
과제공간 절약, 장스트로크, 고속, 고주파산업철강·비철용도직선 이동제품고속 리프터 -
천장 반송용 컨베이어로의 승강 기구에 채용해, 고택트 반송을 실현
 과제공간 절약, 고속, 고주파산업자동차 산업용도직선 이동제품직선 작동기
과제공간 절약, 고속, 고주파산업자동차 산업용도직선 이동제품직선 작동기 -
실린더에 필요한 스트로크 분의 공간을 줄여 설비를 컴팩트하게
 과제공간 절약산업공작기·성형기용도직선 이동제품직선 작동기
과제공간 절약산업공작기·성형기용도직선 이동제품직선 작동기 -
천장부 유닛을 와이어 승강 방식보다 공간 절약에
 과제공간 절약산업식품·음료용도직선 이동제품직선 작동기
과제공간 절약산업식품·음료용도직선 이동제품직선 작동기 -
리프터의 저상화에 의해 상하 2단의 컨베이어의 콤팩트화에 성공
 과제공간 절약산업자동차 산업용도직선 이동제품직선 작동기
과제공간 절약산업자동차 산업용도직선 이동제품직선 작동기