기술자료 감속기 DC 브러시리스 모터/서보 모터용 감속기 선정
관성 모멘트를 구하는 방법
1. 회전 운동체의 관성 모멘트
| 운동체 | 관성 모멘트 산출식 SI 단위 |
GD 2 계산식 {중력 단위} |
|
|---|---|---|---|
| 회전 중심이 자축과 같은 경우 | 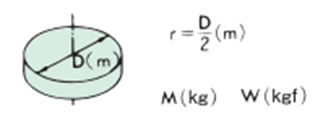 |
I=
1
2
Mr2
(kg・m2) |
GD2=
1
2
WD2 {kgf・m2} |
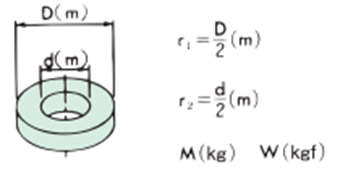 |
I=
1
2
M(r12+r22)
(kg・m2) |
GD2=
1
2
W(D2+d2) {kgf・m2} |
|
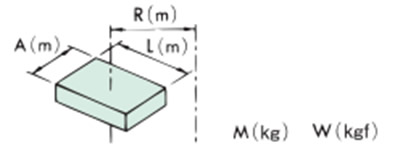
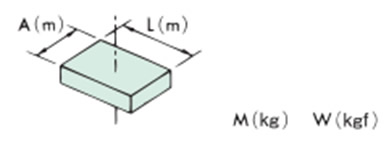 |
I=
1
12
M(A2+L2)
(kg・m2) |
GD2=
1
3
W(A2+L2) {kgf・m2} |
|
| 회전 중심이 자축과 다른 경우 | 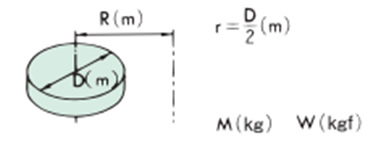 |
I=M
r2
2
+R2
(kg・m2) |
GD2=W
1
2
D2+4R2
{kgf・m2} |
 |
I=
M
4
A2+L2
3
+4R2
(kg・m2) |
GD2=W
A2+L2
3
+4R2
{kgf・m2} |
|
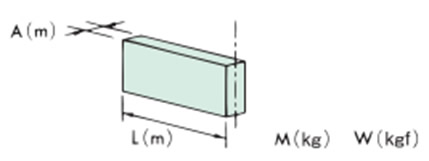 |
I=
M
12
(A2+4L2)
(kg・m2) |
GD2=
1
3
W(A2+4L2) {kgf・m2} |
2.평행 운동체의 상당 관성 모멘트
| 운동체 | 관성 모멘트 산출식 SI 단위 |
GD 2 계산식 {중력 단위} |
|---|---|---|
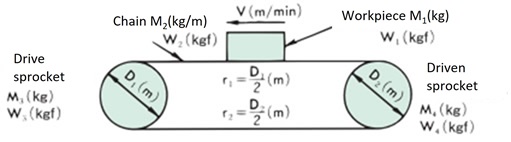 |
I=M1r12+M2r12+
M3r12+M4r22
2
(kg・m2) |
GD2=W1D12+W2D12+
W3D12+W4D22
2
{kgf・m2} |
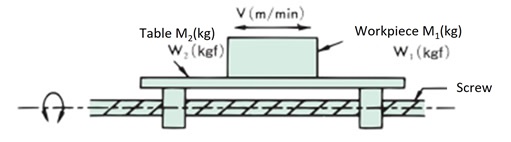 |
I=
1
4
(M1+M2)×
V
π n
2
(kg・m2) n:Vに対応するモータの回転速度(r/min) |
GD2=(W1+W2)×
V
π n
2
{kgf・m2} n:Vに対応するモータの回転数(r/min) |
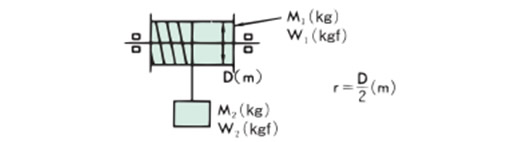 |
I=
1
2
M1r2+M2r2
(kg・m2) |
GD2=
1
2
W1D2+W2D2 {kgf・m2} |
